
本文借用这个概念来介绍一种特殊的学习方法--“观想”系统插图。“观想”不同于死记硬背,关键在于把图背活,让图中的部件运动起来。通过“观想”文中插图来学习安定面配平系统,可以起到事半功倍的效果。
第一节 电 路 部 分
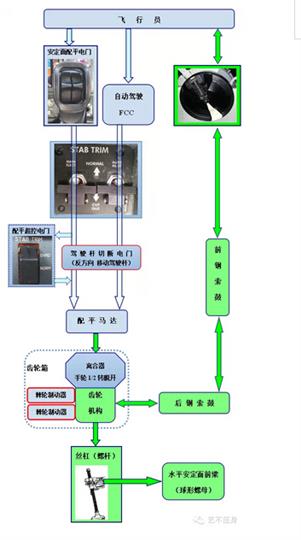
电路部分的学习重点在于“安定面切断电门”、“驾驶杆切断电门”和“安定面超控电门”的工作逻辑。
(1)主电/自动驾驶切断电门

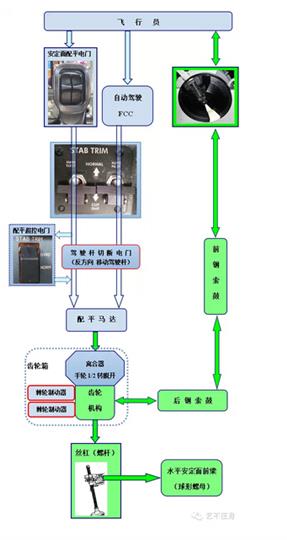
正常情况下,B737NG飞机使用一台交流马达驱动水平安定面偏转。这台交流马达由2号转换汇流条供电。主电配平电门和FCC通过各自的电路控制配平马达转动。两套电路各有一个切断电门可以切断指令。但是在故障处置中不存在分开使用的情况,只要切断即将两个电门全部切断。
(2)驾驶杆切断电门

两个驾驶杆内都安装有“驾驶杆切断电门”。向配平转动的相反方向推动驾驶杆时,“驾驶杆切断电门”会切断配平马达的电源。这一点大家可以在地面准备的时候尝试一下,顶着杆向后打配平,或者带着杆向前打配平,都是没有任何反应的。
既然已经安装了“安定面配平切断电门”,为什么还要在驾驶杆上额外设计一个切断电门呢?这是针对配平马达失控而设计的一个相当巧妙而且非常必要的装置。我们以配平马达非指令的向后转动为例说明。
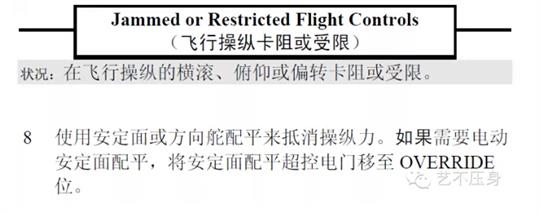
配平马达向后飞转,会导致机头快速上仰。此时飞行员的本能反应是前推驾驶杆,试图控制飞机状态。见过B737飞机水平尾翼的人都知道,水平安定面的面积远大于升降舵。依靠升降舵的反方向偏转,根本不足以抵消安定面的非指令偏转。想要阻止失控,必须尽快将安定面马达断电。
驾驶杆的移动方向一定与配平失控的方向相反,驾驶杆切断电门的设计正是利用了人的这一本能反应。“驾驶杆用力保持”,一个动作达成了配平马达断电和飞行姿态恢复两个目的。这才是《安定面配平失控检查单》记忆项目第一项的真正用意。
优秀的飞机设计能够带给人逻辑的美感。
马达断电、状态可控之后,机组再回过头来切断“安定面配平切断电门”。这样可以将驾驶杆操纵解放出来,避免机组长时间对驾驶盘施加力量带来的疲劳。
(3)安定面配平超控电门
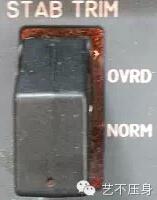
“安定面配平超控电门”的目的只有一个,就是超控“驾驶杆切断电门”。
上文中我们讲到“驾驶杆切断电门”被触发时,安定面配平马达无法工作。将“安定面超控电门”置于OVRD位,可以让主电配平指令绕过“驾驶杆切断电门”控制配平马达。
这一功能我们同样可以在地面进行验证。将“安定面配平超控电门”置于OVRD位后,顶杆向后打配平,或者带杆向前打配平都是可以实现的了。
需要特别注意的一点是,在《安定面配平不工作》检查单中并没有使用“安定面配平超控电门”的操作项目。
从理论上讲,“驾驶杆切断电门”故障是有可能导致安定面配平不工作的。使用“安定面配平超控电门”有可能恢复电动配平功能。但是单纯的安定面配平不工作,不允许机组超控“驾驶杆切断电门”。原因有二:
首先,能够导致电动配平无响应这一现象的故障源有很多。例如配平马达故障、安定面机构卡阻、安定面结冰等等。机组无法确定故障是否源自“驾驶杆切断电门”。使用“安定面配平超控电门”缺乏依据。
其次,我们无法准确预计一台故障设备的运转情况。这一秒钟电动马达的故障表现为不工作,下一秒中电动马达就可能会飞转。由于故障源可能是配平马达,最稳妥的处置是将电路部分全部断电隔离。人工配平有足够的性能保障后续飞行。
“驾驶杆切断电门”是防止飞机状态失控的一道重要屏障。为了恢复电动配平而冒配平失控的风险得不偿失。人工配平手轮有足够的性能保证飞行安全。
只有在面临更恶劣、更紧急的状况时,机组才需要使用“安定面配平超控电门”。
第二节 机 械 部 分
安定面配平的机械部分有两个主要功能:转得动、停得住。
(1)丝杠、球形螺帽
安定面配平系统所有的机械部件全都围绕着“丝杠”这个部件工作。在某些文献中“丝杠”也被称作“起重螺杆”。
通俗的讲,丝杠就是一跟螺杆。在这根螺杆上面套有一个球形螺帽。当丝杆转动时,球形螺帽会被螺纹推动着上下游动。当丝杠停止时,球形螺帽会被螺纹固定在当前位置无法移动。
球形螺帽被安装在安定面前梁的接头上。当球形螺帽上下游动时,就会推动安定面改变角度。这就是B737水平安定面的工作原理了。
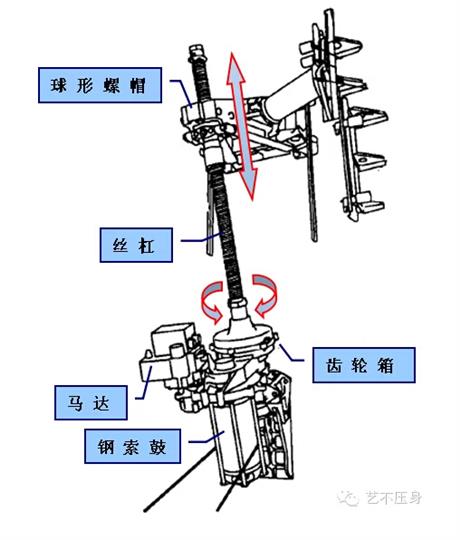
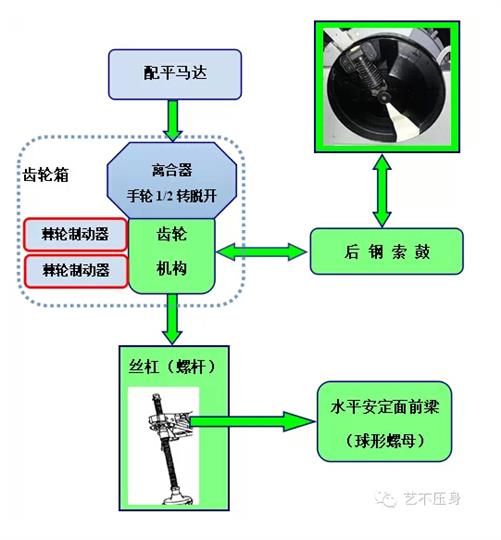
(2)齿轮箱
齿轮箱有三项主要功能:传动、制动和离合。
传动:
当配平马达工作时将机械转动输入齿轮箱。齿轮箱将转动传递给丝杆和后钢索鼓。前者驱动安定面改变角度,后者带动配平手轮转动。
当使用人工配平时,配平手轮通过钢索机构将机械转动输入齿轮箱,进而带动丝杠转动。
离合:
齿轮箱在配平马达一侧安装有离合器。如果配平马达卡死,用力转动手轮约1/2转,即会使配平马达与齿轮箱脱开。离合器能否脱开,可以用来推断安定面卡阻的部位。
制动:
在齿轮箱内安装有两套棘轮制动机构。在不使用配平的时候,棘轮制动机构将丝杠抱死,防止水平安定面角度改变。如果棘轮制动机构失效,水平安定面会向空气阻力最小的位置偏转。
第三节 闭环控制中的信号反馈
B737的安定面配平机构利用电路和机械机构结合,巧妙的构成若干个闭环控制回路。当一个配平指令发出后,由各个环路反馈的信息是否匹配,是判断安定面配平故障的重要途径。
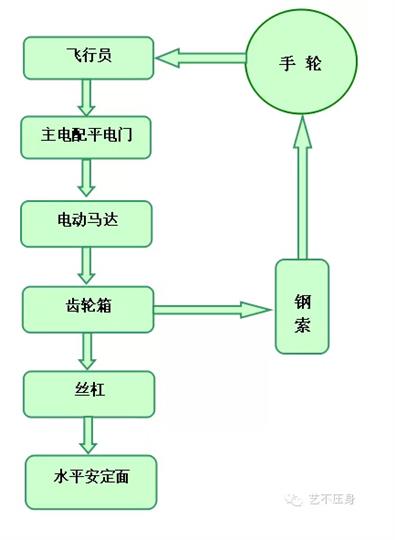
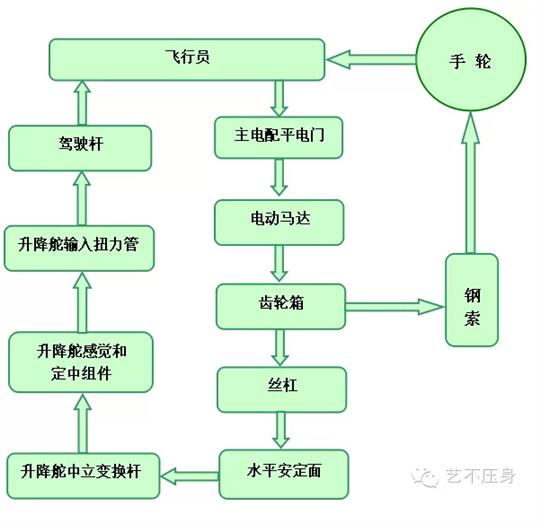
(1)配平手轮环路:
主电配平电门向电动马达下达指令。电动马达通过齿轮箱驱动丝杠(螺杆)转动,改变安定面角度。在驱动丝杠的同时,齿轮箱还会通过钢索带动驾驶舱内的安定面配平手轮转动。
由于丝杠、齿轮箱、钢索、手轮四者永远硬性连接在一起,所以手轮转动,即丝杠转动。系统利用配平手轮,将指令的执行情况反馈到驾驶舱内,构成一个闭环控制回路。
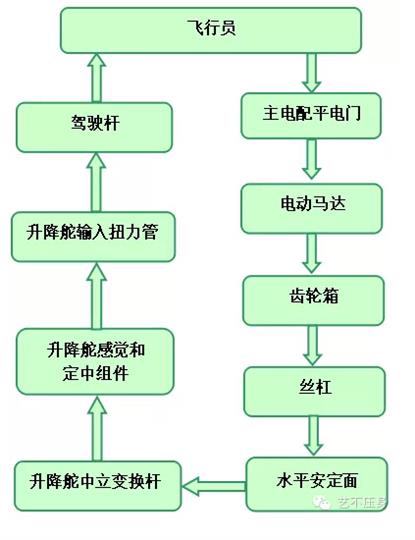
(2)驾驶盘感觉系统环路:
升降舵感觉计算机能够使用空速(来自升降舵皮托管系统)和安定面位置提供模拟空气动力。升降舵感觉和定中组件把模拟的力度信号传输给驾驶杆。
——《B737飞行机组操作手册》
升降舵感觉计算机从A 和B 液压系统接收压力,从空速管接收动压,以及从安定面接收的机械输入。升降舵感觉计算机用动压和安定面输入控制到感觉和定中组件中的双感觉作动筒的液压压力。感觉和定中组件的感觉力随空速增加而增加。
——《B737NG飞机维护手册》
安定面移动两个升降舵中立变换杆。中立变换杆通过马赫配平作动筒感觉和定中组件,以及升降舵输入扭力管到PCU给升降舵提供输入。当升降舵输入扭力管移动时,也回传操纵钢索,给驾驶杆带动到新的中立位置。
——《B737NG飞机维护手册》
我们知道在B737飞机上,驾驶盘杆力并非真正来自操纵舵面的空气动力。在俯仰方向上,升降舵感觉系统通过调整驾驶杆定中机构的位置来模拟杆力。
升降舵感觉系统根据空速和水平安定面位置调整模拟杆力的大小。由于水平安定面的位置是通过机械连杆的方式输入升降舵感觉系统的,所以在空速不变的前提下,驾驶盘杆力可以间接的反应水平安定面的位置变化。
(3)自动驾驶配平的闭环控制
“安定面位置传感器测量安定面的位置。传感器A 将位置信号送给FCC A和飞行数据获得组件(FDAU),传感器B 将位置信号送给FCC B。”
——《B737NG飞机维护手册》
“中位偏移传感器测量安定面与升降舵之间的相对位置,并将该信号送给两个FCC。安定面位置传感器:两个安定面位置传感器会将安定面位置数据传递给同侧的FCC。”
——《B737NG飞机维护手册》
“安定面位置传感器”和“中位偏移传感器”将数据传递给FCC。FCC依据这些数据调整自动驾驶配平的工作指令。在某些选型较旧的B737NG上,机组可以通过ACMS查看安定面配平位置信息。
如果自动驾驶未正确地配平安定面,会触发“STAB OUT OF TRIM”灯亮。注:当飞机有大的配平需求时,“STAB OUT OF TRIM”灯短时闪亮是正常现象。
信息反馈汇总
(1)丝杠——安定面配平手轮、安定面位置指示器
(2)安定面实际位置——驾驶盘杆力
(3)安定面位置传感器、中立位偏移传感器——“STAB OUT OF TRIM”灯
第四节 案 例 分 析
下面我们以案例的形式,来讲解如何利用驾驶舱内的信息识别和处置安定面配平故障。每一个案例都需要我们“观想”下面几幅插图的运动,遵循以下的原则分析。
(1)离合器脱开前,配平手轮转动,即说明马达、齿轮箱和丝杠在转动。
(2)离合器脱开后,配平手轮转动,即说明齿轮箱和丝杠在转动。
(3)空速不变的前提下,驾驶盘杆力变化,即说明安定面角度发生了改变。
案例一
现象:
(1)自动驾驶接通状态下,“STAB OUT OF TRIM”灯亮。
(2)脱开自动驾驶,机头有上仰趋势,有明显的顶杆力。
(3)使用主电配平,配平手轮有响应,驾驶杆力能够消除。
分析:
(1)“STAB OUT OF TRIM”灯常亮,说明自动驾驶不能正确配平飞机。
(2)断开自动驾驶,机头上仰,有顶杆力,说明安定面确实处于不适当的位置。
(3)使用主电配平,配平手轮有响应。说明配平马达能够驱动齿轮箱和丝杆转动。
(4)使用主电配平后,驾驶盘杆力能够消除,说明安定面已经向指令的方向偏转。
结论:
(1)自动驾驶不能正确指令配平工作。
(2)主电配平工作正常。
(3)执行《安定面失去配平检查单》
案例二
现象:
(1)自动驾驶接通状态下,“STAB OUT OF TRIM”灯亮。
(2)脱开自动驾驶,机头有上仰趋势,有明显的顶杆力。
(3)使用主电配平,配平手轮无响应。
(4)人工转动配平手轮,手轮可以转动。
(5)随着配平手轮向前转动,顶杆力逐渐被消除。
分析:
(1)“STAB OUT OF TRIM”灯常亮,说明自动驾驶不能正确配平飞机。
(2)断开自动驾驶,机头上仰,有顶杆力,说明安定面确实处于不适当的位置。
(3)使用主电配平,配平手轮无响应,说明配平马达、齿轮箱和丝杆均未转动。
(4)人工转动配平手轮,手轮可以转动,说明齿轮箱、丝杆工作正常。
(5)随着配平手轮向前转动,顶杆力逐渐被消除,说明安定面已经向指令的方向偏转。
结论;
(1)安定面配平马达无法工作,但是无卡阻。
(2)人工转动配平手轮能够改变安定面角度。
(3)执行《安定面配平不工作检查单》
案例三
现象:
(1)自动驾驶接通状态下,“STAB OUT OF TRIM”灯亮。
(2)脱开自动驾驶,机头有上仰趋势,有明显的顶杆力。
(3)使用主电配平,配平手轮无响应。
(4)人工无法转动配平手轮。
(5)用力转动配平手轮约1/2转,手轮仍无法转动。
(6)随着配平手轮向前转动,顶杆力逐渐被消除。
分析:
(1)“STAB OUT OF TRIM”灯常亮,说明自动驾驶不能正确配平飞机。
(2)断开自动驾驶,机头上仰,有顶杆力,说明安定面确实处于不适当的位置。
(3)使用主电配平,配平手轮无响应,说明配平马达、齿轮箱和丝杆均未转动。
(4)人工转动配平手轮阻力很大,说明配平机构存在卡阻。
(5)用力转动1/2转手轮,手轮恢复转动,说明齿轮箱内离合器与马达脱开。
(5)随着配平手轮向前转动,顶杆力逐渐被消除,说明安定面已经向指令的方向偏转。
结论;
(1)安定面配平马达故障卡死,自动驾驶和主电配平都无法控制。
(2)离合器脱开后,人工转动配平手轮能够改变安定面角度。
(3)执行《安定面配平不工作检查单》
案例四
现象:
(1)自动驾驶接通状态下,“STAB OUT OF TRIM”灯亮。
(2)脱开自动驾驶,机头有上仰趋势,有明显的顶杆力。
(3)使用主电配平,配平手轮无响应。
(4)人工无法转动配平手轮。
(5)用力转动配平手轮约1/2转,手轮仍无法转动。
分析:
(1)“STAB OUT OF TRIM”灯常亮,说明自动驾驶不能正确配平飞机。
(2)断开自动驾驶,机头上仰,有顶杆力,说明安定面确实处于不适当的位置。
(3)使用主电配平,配平手轮无响应,说明配平马达、齿轮箱和丝杆均未转动。
(4)人工无法转动配平手轮,说明配平机构存在卡阻。
(5)用力转动1/2转,手轮仍然,说明不是配平马达卡阻。
结论;
(1)安定面机械机构出现卡阻。
(2)如果存在结冰条件,下降至较暖区域,再次使用手轮尝试。
(3)执行《安定面配平不工作检查单》
案例五
现象:
(1)自动驾驶接通状态下,配平手轮持续向后转动。“STAB OUT OF TRIM”灯常亮。
(2)随后自动驾驶非指令断开,配平手轮继续向后转动,机头有上仰趋势。
(3)机组向前顶杆,配平手轮停止转动。
(4)向前搬动主电配平电门,配平手轮无反应。
(5)切断“安定面配平切断电门”,人工转动配平手轮,手轮可以转动。
(6)随着配平手轮向前转动,顶杆力逐渐被消除。
分析:
(1)自动驾驶非指令断开,机头上仰,说明安定面配平未在正确位置,抬头力矩超过自动驾驶的能力范围。
(2)自动驾驶断开后配平手轮继续转动,说明马达、齿轮箱和丝杆仍在转动。
(3)机组向前顶杆,马达停止向后转动,说明驾驶杆切断电门动作,配平马达断电。
(4)人工可以转动配平手轮,说明手轮、齿轮箱和丝杠工作正常。
(5)顶杆力能够消除,说明安定面能够随丝杆改变角度。
结论
(1)配平马达故障,发生非指令的转动。
(2)人工配平能够正常操纵安定面。
(3)执行《安定面配平失控检查单》
案例六
现象:
(1)自动驾驶接通,配平手轮时而前转,时而后转。
(2)断开自动驾驶,配平手轮持续后转,有顶杆力。
(3)向前推杆,配平手轮继续向后转动。
(4)向前打配平,配平手轮向前转,顶杆力消除。
(5)松开配平电门后,配平手轮继续向后转动,顶杆力再次出现。
(6)切断“安定面配平切断电门”,配平手轮继续向后转动。
(7)人工握紧配平手轮,向前打配平。顶杆力消除。
(8)松开配平手轮,手轮继续向后转动。
分析
(1)“驾驶杆切断电门”和“安定面配平切断电门”都无法阻止配平手轮向后转动,说明非指令转动并非源自配平马达。
(2)使用主电配平,手轮响应正常,说明配平机构不存在卡阻。
(3)人工配平能够消除杆力,说明手轮、齿轮箱和丝杠工作正常。
(3)配平手轮被松开后继续向后转,说明齿轮箱内的“棘轮制动”失效。
结论
(1)齿轮箱内的“棘轮制动”失效,水平安定面会自动向空气阻力最小的角度偏转。由于“球形螺帽”受丝杆螺纹的阻力,所以手轮转动持续但缓慢。
(2)安定面的非指令偏转达到一定程度时,自动驾驶配平会尝试修正,所以会出现“时而前转,时而后转”的现象。
(3)使用手轮消除驾驶盘杆力。
(4)不需要配平时握紧手轮,保持安定面在需要的角度。
(5)执行《安定面配平失控检查单》
编者按:
笔者曾经在模拟机上尝试过用手握紧飞转的配平手轮,那种巨大的摩擦力让人印象深刻。我们有必要在此介绍一下人工制动配平手轮的注意事项。
(1)坚决一把握死。
手轮旋转时巨大的摩擦作用可能会擦伤手掌。在接触瞬间将手轮一把握死,缩小摩擦行程,才能将擦伤的可能降到最低。如果手边有毛巾的话,垫在手轮上会有帮助。

(2)顺虎口方向握紧。
让手掌的虎口顺着手轮转动的方向握紧,可以避免虎口撕裂。以左座为例:如果手轮向前飞转,使用右手握住;如果手轮向后飞转,使用左手握住。

(3)如果可能,用脚。
用鞋底踩住配平手轮,可以迅速制动配平手轮。但是在狭小的B737驾驶舱内,这个动作只能由PM来完成,而且有啤酒肚的人会很吃力。

案例七(阿拉斯加261空难)
现象:
(1)自动驾驶接通时,配平手轮持续转动。“STAB OUT OF TRIM”灯常亮。
(2)自动驾驶断开后,存在明显的顶杆力。
(3)使用主电配平,配平手轮响应正常,但是顶杆力无法消除。
分析
(1)“STAB OUT OF TRIM”灯常亮,说明自动驾驶不能正确配平飞机。
(2)顶杆力说明安定面不在适当的角度。
(3)使用主电配平,配平手轮响应正常,说明马达、齿轮箱和丝杆转动正常。
(4)杆力无法消除,说明安定面角度未发生改变。
结论:
丝杠转动,但是安定面角度未发生改变!意味着“球形螺母”脱离了丝杠螺纹的控制,说通俗一点就是“脱扣”了。这种情况极为少见,只有在丝杠与球形螺母间发生恶性磨损的时候才可能发生。但是一旦发生其后果将是非常致命的。
“美国联邦航空局(FAA)发布适航指令(AD)建议,希望B737飞机的广大运营商对飞机上的水平安定面作动器配平致动机构反复进行检查、润滑、修理和翻修,以避免发生可能的失控事故。
在2000年1月阿拉斯加航空公司的一架MD-83飞机因致动螺杆润滑不当引发灾难性事故后,波音公司对其所有飞机的配平装置进行了一项设计评审和安全分析,FAA的这份AD就是根据此项审查分析结果提出的。
据FAA透露,在波音审查期间,一架B757的运营商曾报告,在该飞机配平机构的滚珠丝杠中的球轴承主载荷路经上出现"大面积腐蚀"。FAA指出,波音飞机上的配平机构虽然在设计上与失效的MD-83 系统不同,但二者完成类似的功能,并在失效后会引发同样的飞机层面上的影响。
如果对这种状况不加以修正,可能会导致水平安定面配平制动机构的传动装置乃至后续的二级载荷路径磨损失效,从而可能导致丧失水平安定面的控制,随之而来的是飞机失控。
由于757上的滚珠丝杠组件与737飞机上的系统类似,FAA主张所有这些型号的飞机会存在同样的不安全状况,因此,FAA正考虑对757飞机的配平系统提出类似的规章要求。”
——[英国?飞行国际?2008年4月28日报道]
在阿拉斯加261航班空难中,机组发现使用安定面配平无法消除飞机的上仰趋势。此时的丝杠已经发生了恶性磨损,但是磨损的程度和长度都还有限。在后续的飞行中,不明就里的机组反复的使用安定面配平电门,希望能够恢复安定面控制。
在配平马达反复的驱动下,丝杠的磨损程度和长度逐渐扩大。水平安定面可以自由偏转的角度也就越来越大。机组俯仰操纵越来越困难,也就越发急于使用电动配平。
这造成了一个恶性的循环,最终造成水平安定面飞脱,飞机空中解体。
处置丝杠恶性磨损,最困难的地方就在于尽早识别,阻止磨损进一步恶化。利用我们上文中介绍的“闭环反馈”的理念,可以让你在最短的时间内发现异常。
当配平指令下达后,两个闭环回路反馈的信息明显不匹配:
(1)配平手轮转动,说明丝杆转动。
(2)杆力无法消除,说明安定面角度未发生改变。
一旦发现上述现象,停止使用安定面配平。使用升降舵操纵飞机,在最近的合适机场着陆。除了“双发失去推力”,再没有比“丝杠恶性磨损”更可怕的故障了。
一个听来的故事:
在我还是新机长的时候,有一位资深教员向我讲述了他亲身经历的一个故事。
在老版本的B737上,MCDU上的ACMS可以显示安定面位置传感器的读值。这位教员有一个习惯,每一次核对舱单设定配平之后,都会在ACMS的页面中看一下安定面位置读值是否与安定面指示器相吻合。
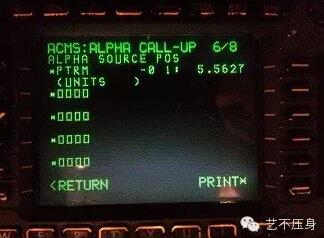
有一天这位教员按照舱单将“安定面配平指示器”的刻度打到“5”个单位后,习惯性的进入ACMS上检查安定面位置。他发现ACMS显示安定面位置为“0”个单位!
在他的一再坚持下,机务打开机尾的维护舱门检查安定面配平机构。检查的结果让所有人大吃一惊,球形螺母与丝杠完全滑扣。
当真是老天开眼!!!那一天是他飞那架飞机!!!至少在笔者接触过的机长中,他是唯一有检查ACMS习惯的人。这件事儿如果换作旁人,当天必死无疑。你能够想象一架飞机在水平安定面处于“0”个单位起飞是什么后果吗?
(本文仅代表作者观点,中国民用航空网保持中立。)


