
作 者: 陈 谋, 姜长生, 梅 蓉
(南京航空航天大学自动化学院,江苏南京 210016)
摘 要:针对机动飞机按时标分离原则可分为快慢两个子系统而形成两环控制结构的特点,提出了最优滑模飞控系统的设计。外环控制器的设计采用基于依赖状态的Riccati方程最优控制器,用以产生最优滑模面,以保证整个飞控系统具有一定的性能鲁棒。内环控制器设计时采用滑动模控制以减小飞控系统对参数变化、模型误差、外部干扰敏感,具有一定的稳定鲁棒性。最后对机动飞机作大机动仿真,仿真结果表明该飞控系统是有效的。
引 言:
目前飞控系统设计已有很多的研究成果,大多数飞控系统的设计都是基于线性系统理论提出的。但飞机飞行时呈现出的强非线性使得这些研究成果没有多大实际应用价值。特别是对具有超机动飞行能力的新一代歼击机,由于其飞行的高敏捷性,各个状态严重耦合且呈严重的非线性,此时线性控制方法已达不到所需要的飞行品质。这就要求针对非线性飞机模型设计出有效的控制方法以满足机动飞行控制的需要。因此用非线性理论来控制飞机非线性模型引起了广泛的研究。
目前用非线性控制理论研究飞控系统的方法主要有:反馈线性化[1]、变结构控制[2-3],非线性预测控制[4-5]、非线性H∞控制[6-7]、非线性动态逆控制[8-9]。
基于SDRE(State-Dependent Riccati Equation)控制方法是对非线性控制提出的一种新的控制方法,由于其具有较好的实时性和设计的灵活性,因此在非线性控制中得到了较为广泛的使用[10-11]。本文针对飞机按时标可分为快慢两个子系统而形成两环控制结构的特点,提出了最优滑模飞控系统的设计。外环控制器的设计采用基于依赖状态的Riccati方程最优控制器,以保证整个飞控系统具有一定的性能鲁棒。内环控制器设计时采用滑动模控制以减小最优控制误差,减小飞控系统对参数变化、模型误差、外部干扰的敏感,具有一定的鲁棒性。
1 超机动歼击机模型描述
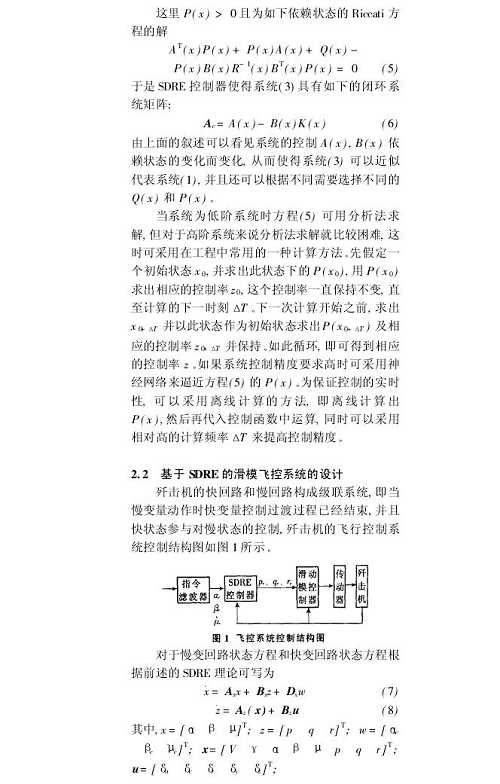
不考虑地球的自转,设地面是局部平坦且具有恒定的重力加速度,假定飞机在平静大气中运动,同时不考虑飞机的气动弹性变形,则可导出飞机的动力学方程,方程的表达式及各个变量的详细定义见文献[5]。机动飞机的运动方程完全是6自由度12状态的非线性方程且各状态变量之间相互耦合,因此它的模型比较复杂。12个状态是x,y,z(飞机3个重心运动坐标),V,χ,γ(分别为飞行速度、航迹偏转角、飞行航迹角),α,β,μ(分别为飞行攻角、侧滑角和滚转角),p,q,r(分别为滚转、俯仰、偏航角速率)。根据时标分离的原则可以将飞控系统划分为快慢不同的子系统,对于一般有人驾驶机动飞机来说,只需设计由α、β、μ构成的慢回路和由p、q、r构成的快回路的控制器即可。
2 飞控系统的设计
2.1 SDRE控制方法的提出
依赖于状态的Riccati方程(SDRE)最优控制方法是最近提出的非线性动态系统控制方法,它可看作线性LQR的非线性控制版本。考虑如下的非线性系统

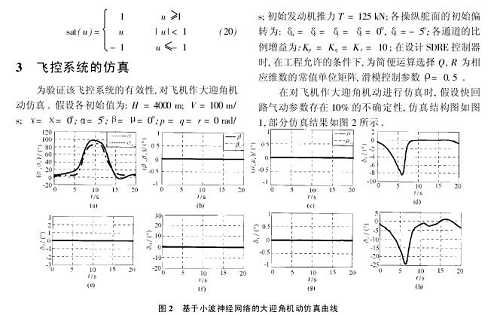
由仿真结果可见,最优滑模飞行控制方案具有较好的跟踪性能和鲁棒性。此外本文所设计的最优滑模飞行控制系统可以推广到中空大速度高机动的情况。
4 结论
本文针对机动飞机按时标可分为快慢两个子系统而形成两环控制结构的特点,提出了最优滑模飞控系统的设计。该控制器为两环控制器,外环控制器的设计采用基于依赖状态的Riccati方程最优控制器,用以产生最优滑模面,以保证整个飞控系统具有一定的性能鲁棒。内环控制器设计时采用滑动模控制以减小飞控系统对参数变化、模型误差、外部干扰敏感,具有一定的鲁棒性,但系统实现的实时性还需进一步讨论。

