
为确保飞机发动机和炼油厂设备等复杂系统能够良好、安全运行,需要时常对其管路进行检查。
值得注意的是,须检查管道的直径有几毫米到几十厘米不等。现有管道机器人大都采用电磁电机和齿轮传动系统,包括轮式、行走式、履带式等各种机器人,较适合检测大直径管道,而当管道直径小于1厘米时,此类机器人的尺寸若想进一步缩小就比较困难,适用性就会大打折扣。
近日,来自清华大学机械工程系现代机构学与机器人化装备实验室的科学家,开发了一款可用于亚厘米(直径1~0.1厘米之间)级管道检测的机器人,重量只有2.2克,直径小于1厘米,长4.7厘米。
本研究成果在一定程度上弥补了微小管道检测领域的不足。
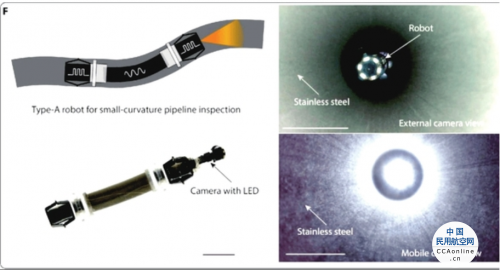
安装摄像头的机器人在不锈钢管中检查环境的图像
相关论文以《一种用于亚厘米尺度管状环境导航的管道检测机器人》(A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale)为题发表在Science Robotics上。清华大学机械工程系博士后汤超为论文第一作者,通讯作者为该系副教授赵慧婵。
据了解,该亚厘米尺度检测机器人采用了智能驱动材料介电弹性体致动器(Dielectric Elastomer Actuators,DEAs)作为人造肌肉。
与小体积的电磁电机相比,DEAs具有更高的功率,更有可能被扩展到小尺寸,从实践来说,其目前已被尝试应用于小型移动机器人上。该工作所采用的DEAs还有着较长的使用寿命和较快的响应速度,因此在管道运动方面表现出独特的优势。
在小型管道中,机器人和管壁之间需要有可靠的相互作用,设计一个软机器人来实现敏捷的导航和有效的检查有着必要性。
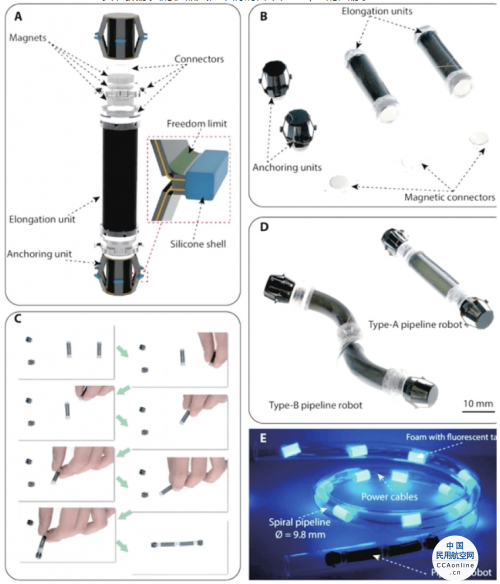
亚厘米级管道机器人的设计和装配
目前,由于一些管道环境(弯曲且含填充介质)较为复杂,此类管道检查任务仍然面临挑战。
其中一个挑战来自于机器人驱动方法的选择。比如气动驱动软机器人,其通常靠加压空气的传质来驱动,这对长距离管道检查不利,机器人速度会大大减慢。
而DEAs依赖于电荷的转移进行驱动,因此具有更高的功率密度,在小型管道检测机器人制作上有着巨大潜力。
另外,为验证该机器人的真实管道检查能力,研究人员在该机器人前面安装了微型摄像机来观察管道内的情形。在人工控制下,它以不同速度成功完成了所安排的检查任务。
“同时,我们研发的亚厘米尺度机器人能够在S形、螺旋形等不同几何形状的管道中移动,即使管道中含有油、气体等介质,也运行良好。它还适用于玻璃、金属或碳纤维等不同管道材质。”汤超说道。
据了解,为了能够在不同形状的管道中高效、快速移动,该软机器人能通过可变数量的磁单元实现快速装配。由于构成机器人的低模量材料具有较高的自由度,因此可以被动地适应管道尺寸和形状的变化。
另一个挑战是设计和制造机器人的本体结构,以实现在小型管道中的高效运动。可拿软体动物和哺乳动物做个类比,哺乳动物进化出了刚性支撑的骨骼结构以及用于软驱动的肌肉,极大地提高了它们的运动能力。
相比于纯软机器人设计,刚性组件的引入也可以大大提高机器人的运动性能。此次研发机器人的锚定单元基于智能复合材料微结构(Smart Composite Microstructure,简称SCM)技术,该技术能够克服微机械加工技术的局限性,已经在微型机器人的结构设计中得到了广泛应用。
“在这项工作中,机器人的运动原理受到了蚯蚓蠕动行为的启发。”汤超补充说,“另外,考虑到管道检测机器人的要求,SCM技术成为设计和制造一个小型但具有传输效力和移动能力的机器人的理想选择。”
据悉,研究人员对机器人的动态特性做了建模和分析,对软材料驱动的一些特殊特性(例如黏性、共振特性)进行了调控和利用,最终实现了机器人在亚厘米大小管道中各方向的快速运动。
总的来说,研究人员展示了一种使用智能材料来构建亚厘米直径规模管道检测机器人的可行性。且该机器人在管道直径(特别是在亚厘米尺度上)、材料和填充介质的变化等方面具有更强的环境适应性。
在未来,研究人员还会探索更灵活、具有主动弯曲能力的驱动器。由于目前机器人通过取消管道外部缆线供电,后续会将有线电缆,代以小型高压电源和高能量密度电池,从而减小行进阻力,进行更深入的管道探索。

